Computer Science
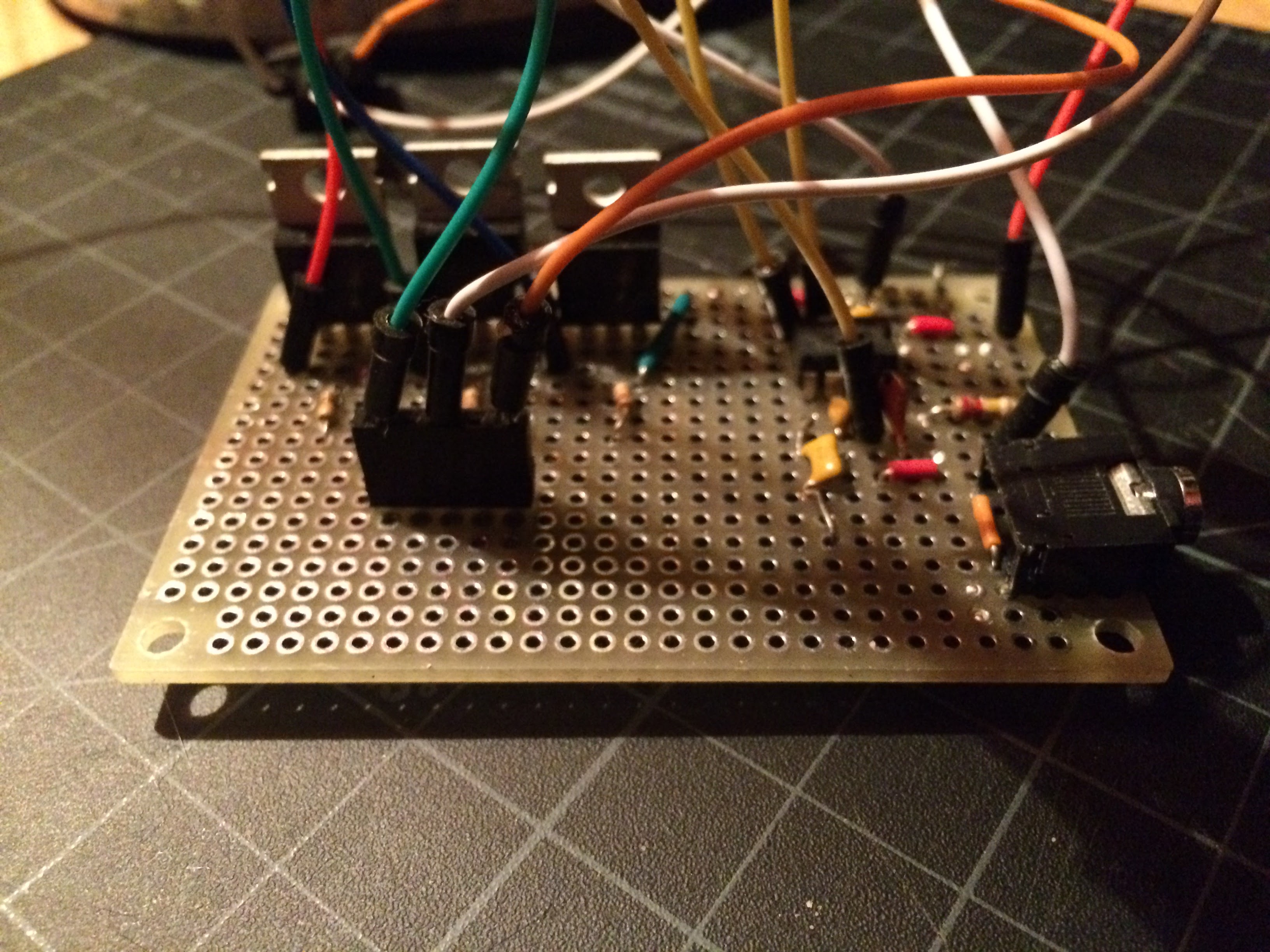
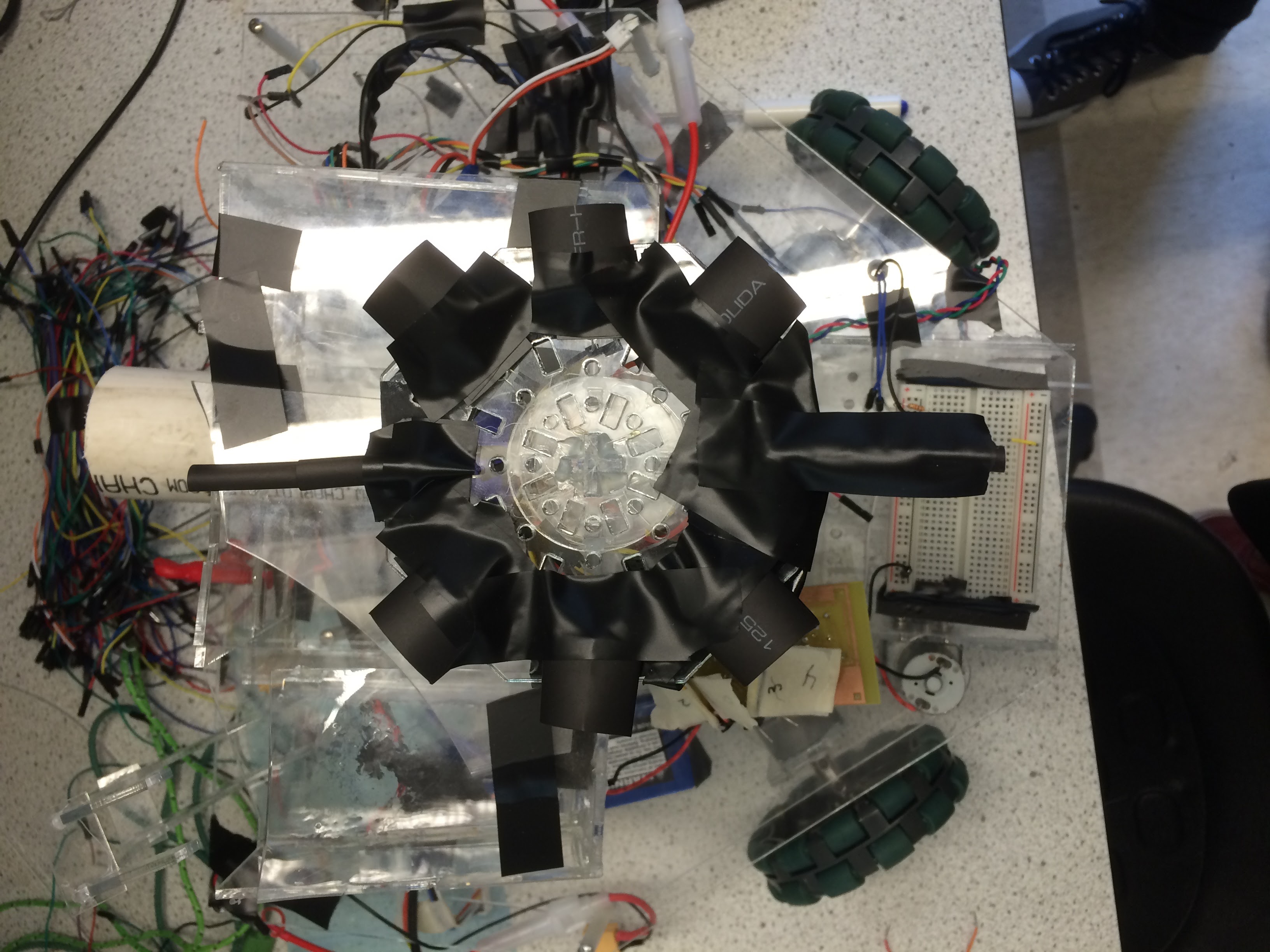
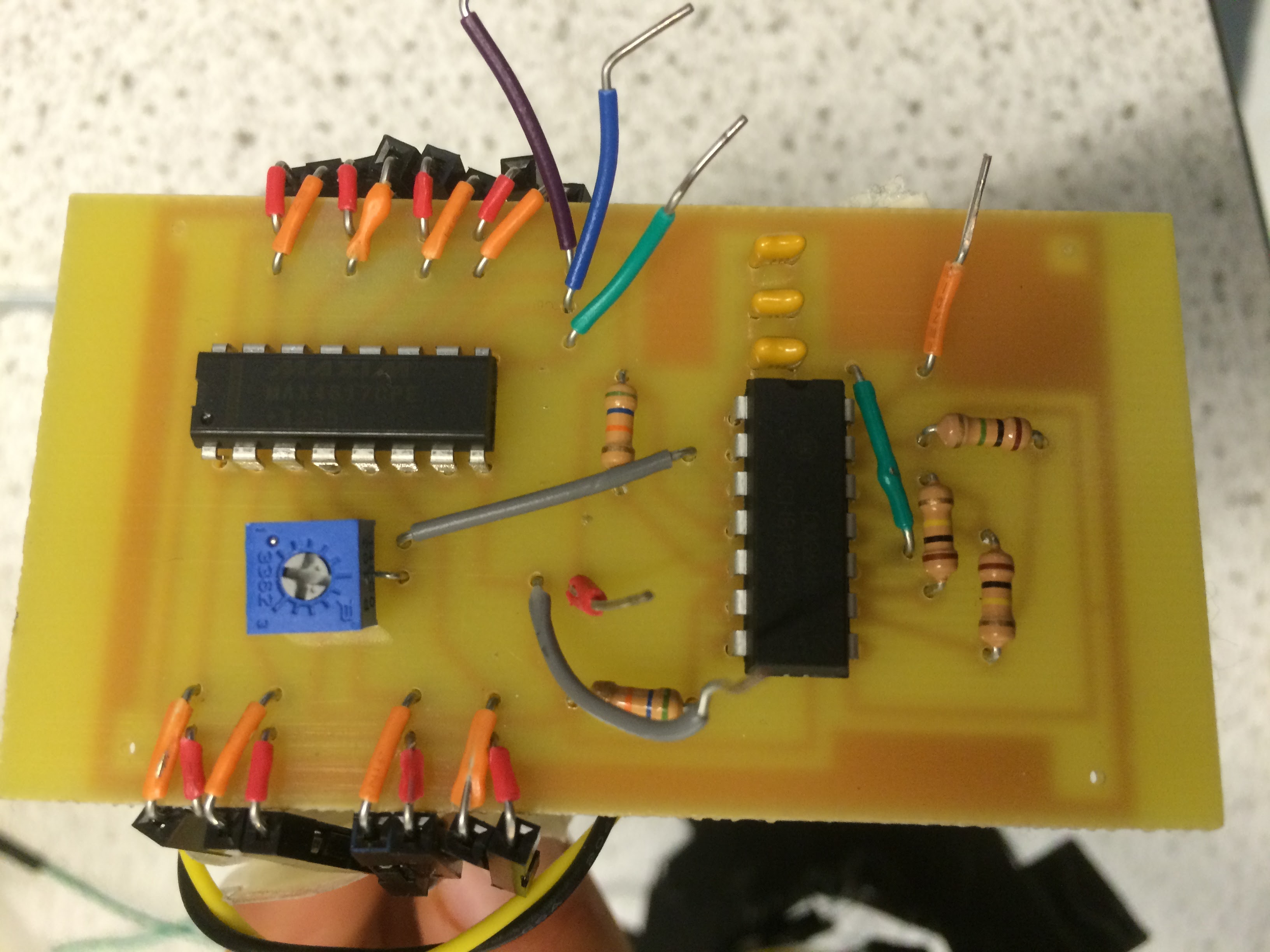
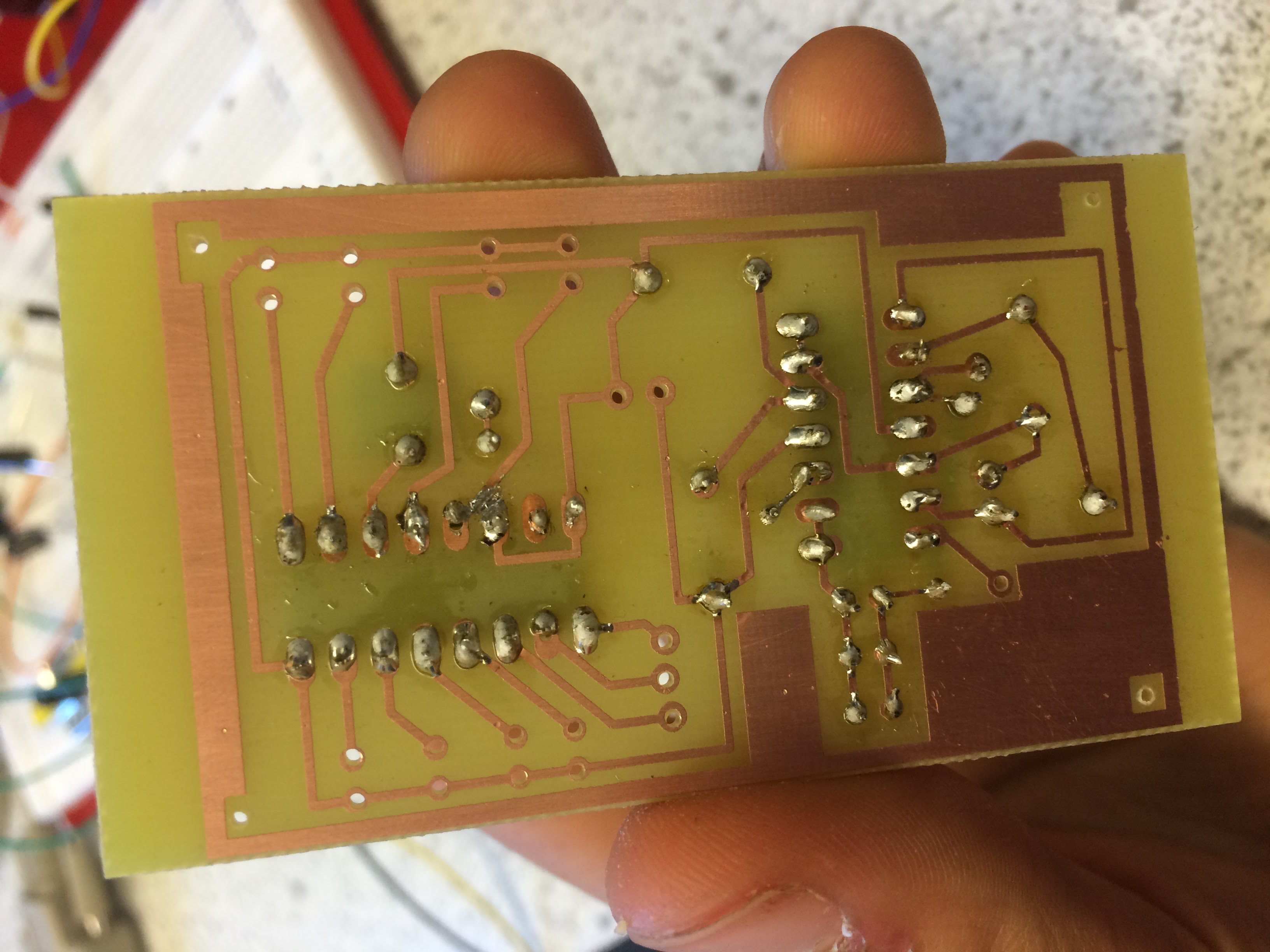
The autonomous robot was designed to collect and shoot ping-pong balls controlled with an mbed microcontroller. The design allowed navigation via phototransistor sensors and a black/white tape sensor. I designed the PCB shown below in Eagle which was used to discern infrared emissions at different frequencies. Through testing we found the best way of colleting the ping pong balls was driving into the center of the arena at different angles and not straight on. Having a flexible scooper was another way that increased our collecting percentage. Functionality of the robot can be seen in the video below.
The purpose of the Smart Alarm Project was to create an interactive alarm clock that requires the user to physically do an action/pose that will turn the alarm off (ie. jumping jacks, yoga sequences, specific dance moves etc.) In order to do this we used a pressure sensitive conductive sheet called velostat. When the alarm goes off the velostat squares light up and once the user puts pressure on them for at least 5 seconds the alarm will turn off. For the full project description and instructable...
click here

The main goal of my mood lamp project was having the light react to an audio input. The project included an audio jack for the audio input as well as a button to switch between moods all controlled by an Arduino board. For a full description of the project...
click here